# 地面站使用手册V1.0
# 一、地面站基础功能介绍
# (一)地面站简介
地面站集数据显示、传感器校准、航线规划、系统设置几大模块
# 1.连接设备
点击左上角logo图标,即可连接无人机获取飞机状态信息。

# 2.飞行数据界面
飞行数据界面主要用于无人机的飞行数据监测,显示无人机飞行时的关键信息,可以检查无人机平台的基础参数设置。

| 序号 | 注解 | 序号 | 注解 |
|---|---|---|---|
| ① | 飞行模式 | ⑨ | 设置 |
| ② | 飞机状态 | ⑩ | 设备位置切换 |
| ③ | 飞行时间 | ⑪ | 地图取点 |
| ④ | 俯仰角度 | ⑫ | 任务列表 |
| ⑤ | 电量 | ⑬ | 自主起降/返航/任务 |
| ⑥ | 卫星数 | ⑭ | 一控多机 |
| ⑦ | 速度 | ⑮ | 上传/下载航线 |
| ⑧ | 相对高度 | ⑯ | 视频窗口 |
# (二)传感器校准界面
传感器校准界面包含加速度计校准、水平修正、陀螺仪校准、罗盘校准、空速计校准功能。

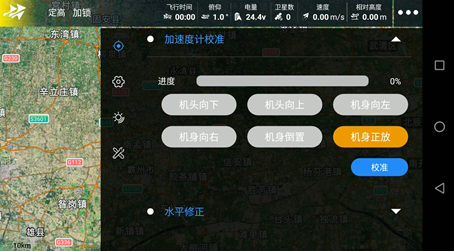
# 1.加速计校准
- 打开加速度计校准界面,点击校准按钮,根据方向提示开始进行加速度计校准,一旦出现方向提示框变为黄色,请保持无人机静止不动。完成当前方向的校准后,屏幕上的相关图标将变为蓝色;
- 按下图所示,依次对各个方向进行校准,在所有方向校准无人机后,地面站将显示校准完成(所有方向图标将以蓝色显示,进度条将完全填充)。
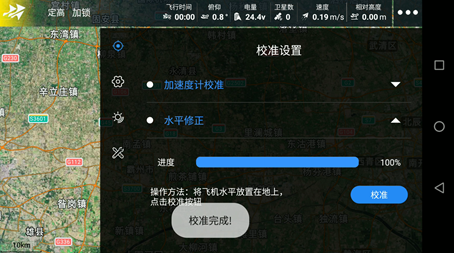
# 2.水平修正
打开水平修正界面, 将无人机以水平飞行方向放置在水平地面上保持静止,待进度条填充完成,显示校准完成。
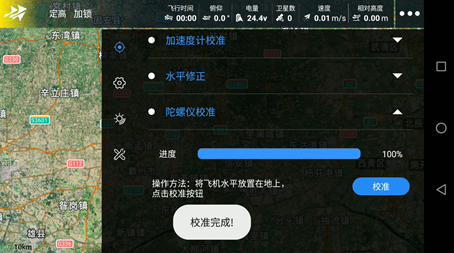
# 3.陀螺仪校准
- 打开陀螺仪校准界面,点击校准按钮开始进行陀螺仪校准;
- 将无人机水平放置在地上并保持静止,待进度条填充完成,显示校准完成。
# 4.罗盘校准
每次启动无人机电源后,检查飞机朝向与实际朝向是否有偏差。如有偏差,偏差大于3~5度,必须进行罗盘校准,否则系统可能无法正常工作,从而影响飞行安全,罗盘容易受到其他电子设备干扰,将导致数据异常影响飞行,甚至导致飞行事故。经常校准可以使罗盘工作在最佳状态,罗盘校准完成后需将飞机重启,即可准备飞行。
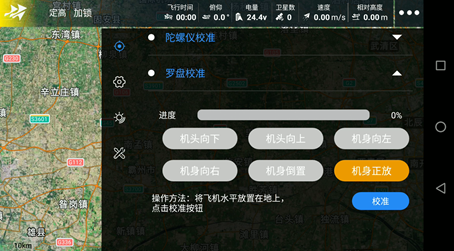
请选择空旷场地,根据下面的步骤校准罗盘:
- 进入罗盘校准设置界面,选择右下角的校准,进行罗盘校准;
- 将无人机水平保持静止,一旦出现飞机方向提示框变为黄色,将无人机绕指定轴向任意一个方向缓慢旋转,完成当前方向的校准后,屏幕上的相关方向提示框将变为蓝色。
| 注意 |
|---|
| 校准时离开地面1米以上距离。 请勿在强磁区域校准,如磁矿、停车场、带有地下钢筋的建筑区域等。 校准时请勿随身携带铁磁物质,如钥匙、手机等。 请勿在大块金属附近校准。 |
# 5.航线规划界面
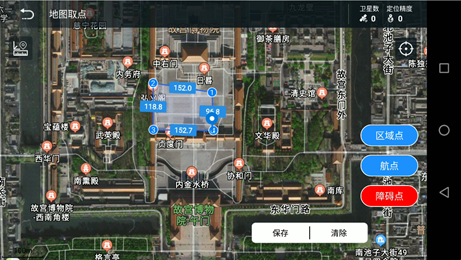
地面站具备自主任务的功能,无人机可执行预先规划好的航线任务。 点击右边的地图取点;

点击地图取点后,会自动弹出设置任务名称以保存此次规划的任务航线信息;

点击目标航点选取需要执行任务的航点,航点位置可根据手持操控终端自身定位和无人机位置、地图选点。
航线规划方法按使用场景一般分为两种,一种是区域点任务规划,主要用于航线规则的区域型任务,另一种为单独航点的任务规划,主要用于场景复杂、航线不规则的自主任务;
# 区域点任务规划
区域点的任务规划,在该页面点选区域点,使用区域点绘制出一个封闭图形,完成后点击保存,任务自动保存在本地,也可上传至云网,任务保存后可以从任务列表内调用任务如下图;

选择需要调用的任务,点击自主规划,无人机会根据航线宽度、航点高度、飞行速度、航线角等参数的设置自动在划定的区域内生成航线任务
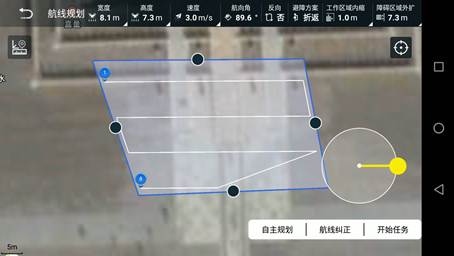
点击开始任务,选择起始和结束的航点,任务会自动上传至飞控,无人机即可执行既定任务航线;

# 航点任务规划
航点的任务规划,在下图页面点选航点,绘制出任务航线,完成后点击保存,任务自动保存在本地,也可上传至云网,任务保存后可以从任务列表内调用任务如下图
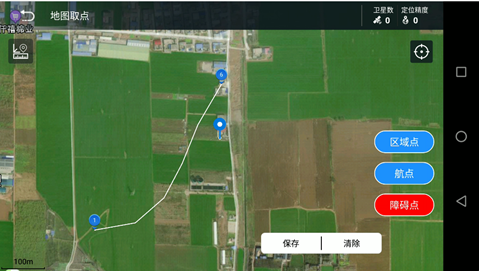
选择需要调用的任务,点击调用任务,无人机会根据设置的航点高度、飞行速度、航线角等参数的设置生成航线任务;
点击开始任务,选择起始和结束的航点,任务会自动上传至飞控,无人机即可执行既定任务航线;

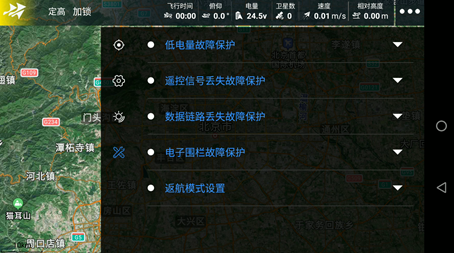
# (三)安全设置
主要包含低电量故障保护、遥控器信号丢失故障保护、数据链丢失故障保护、电子围栏故障保护、返航模式设置、降落模式设置等功能设置。
# 1.低电量故障保护
当飞行电池电量过低、没有足够的电量返航时,用户应尽快降落无人机,否则电量耗尽时无人机将会直接坠落,导致无人机损坏或者引发其它危险。
为防止因电池电量不足而出现不必要的危险,无人机具备电池电压监测功能结合地面站的低电量保护功能可以有效避免因电量不足而造成的无人机损坏。
低电量根据保护动作的不同,触发的层级不同,低电量保护层级分为警告电量值、保护动作电量值和紧急降落电量值三个保护层级,触发三种保护时的电量可在地面站设置;
设置故障保护动作为警告时,分别触发的三个层级的保护都只是地面站触发低电量警告;
设置保护动作为降落时,首先警告电量触发时,地面站会提示低电量的警告,无人机不会触发保护动作,当保护动作电量触发时,飞机执行原地降落保护;
设置紧急降落电量值时,即触发警告电量时地面站发出警告、触发保护动作电量时飞机返航,触发紧急降落电量时飞机原地降落。

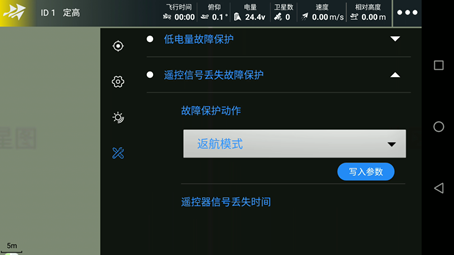
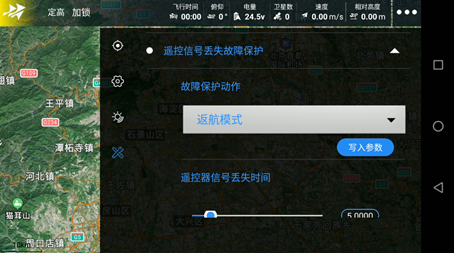
# 2.遥控器信号丢失故障保护
为防止无人机飞行时遥控器出现故障导致飞机失控损坏和不必要的风险,无人机具备遥控器信号丢失故障保护功能,当无人机监测不到遥控器信号时触发保护,用户可根据任务场景在地面站设置无人机的保护动作和遥控器信号丢失时间。
# 3.数据链路丢失故障保护
为防止无人机超视距飞行时数据链路出现故障导致飞机失控损坏和不必要的风险,无人机具备数据链路丢失故障保护功能,当地面站和无人机数据中断时触发保护,用户可根据任务场景在地面站设置无人机的保护动作和数据丢失时间。
# 4.电子围栏故障保护
为防止无人机飞行时出现故障导致飞机失控飞到所属空域外造成损失,无人机具备电子围栏保护功能,当无人机飞出预先设定的高度或者半径范围时,无人机会触发保护动作,用户可根据任务场景在地面站设置无人机的保护动作、最大半径和最大高度,最大高度用于限制无人机的飞行高度,最大半径用于限制无人机的飞行距离。

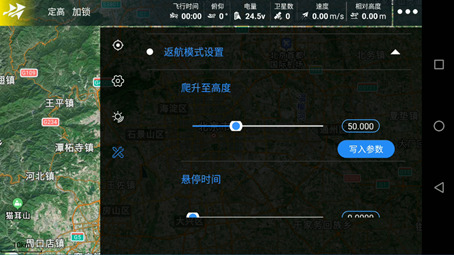
# 5.返航模式设置
地面站具备自动返航功能,根据返航触发方式主要分为手动返航、低电量返航以及失控返航。无人机成功记录了返航点并且在定位服务良好的情况下,当用户手动返航、无人机低电量触发低电量返航、遥控器与无人机之间失去通讯信号以及数据链路信号丢失触发失控返航时,无人机将自动返回返航点。用户可根据任务场景自定义设置爬升高度、悬停时间、悬停高度。
返航点
无人机开机后,当飞控指示灯绿灯闪烁,无人机可以进入定点模式,起飞解锁时,将记录无人机当前解锁起飞位置为返航点。
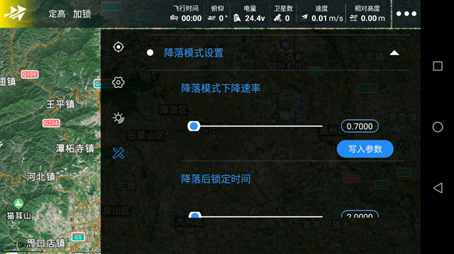
# 6.降落模式设置
无人机具备自动降落功能,根据降落触发方式主要分为低电量返航以及失控返航。当用户手动返航、无人机低电量触发低电量返航、遥控器与无人机之间失去通讯信号以及数据链路信号丢失触发失控返航时,无人机将自动降落。用户可根据任务场景自定义设置降落下降速率、降落后锁定时间。
# (四)系统设置界面
系统设置界面主要显示语音播报、地图类型、视频选择、设备信息等。

# 1.设置
设置界面主要包括语音播报、地图坐标系切换、视频窗口及推流路径、连接方式、高阶设置。

# 2.信息
主要显示无人机地面站版本、固件版本、飞控序列号及飞控使用时间等信息。
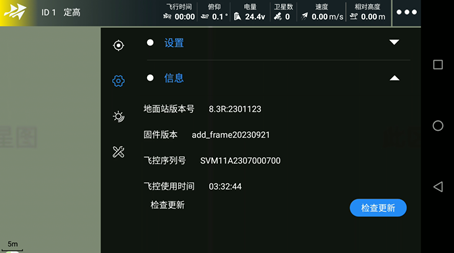
无人机的地面站起到监控和控制无人机的关键作用。它能够接收和显示无人机传感器的数据,提供实时监控,同时通过软件界面进行飞行路径规划、飞行参数调整和任务管理。此外,地面站软件还能与无人机建立通信,传递指令和接收反馈,确保飞行任务的顺利执行。
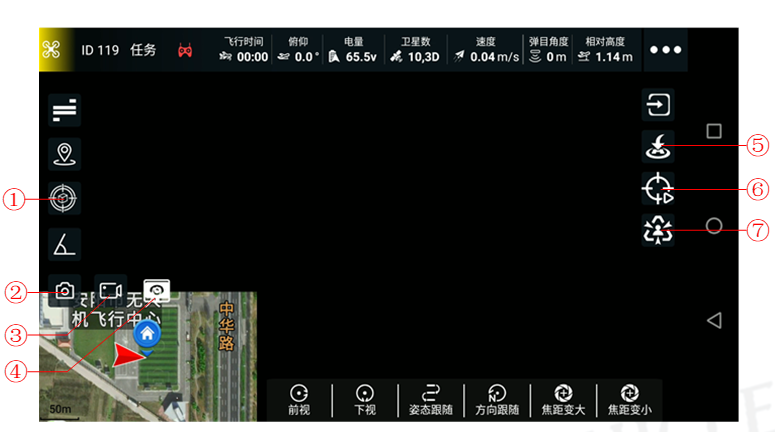
# 二、地面站打击功能介绍

| 序号 | 注解 |
|---|---|
| ① | 光电载荷视角向前 |
| ② | 光电载荷视角向下 |
| ③ | 光电载荷模式的切换,锁头和跟随 |
| ④ | 光电载荷视角跟随飞机的方向变化 |
| ⑤ | 跟踪角度设置 |
| ⑥ | 视频窗口 |
点击 图标,设定打击目标;当图标中出现小箱子样式时,点击开始跟踪目标。
图标,设定打击目标;当图标中出现小箱子样式时,点击开始跟踪目标。
| 序号 | 注解 | 序号 | 注解 |
|---|---|---|---|
| ① | 跟踪目标 | ⑤ | 返航 |
| ② | 拍照 | ⑥ | 目标瞄准 |
| ③ | 录像 | ⑦ | 开始打击 |
| ④ | 视角切换 |
打击角度设定:设定无人机弹目连线与打击目标之间的角度。

# 三、地面站集群功能介绍
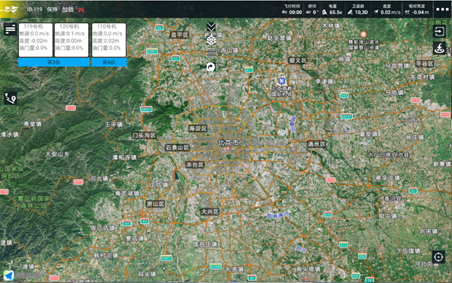
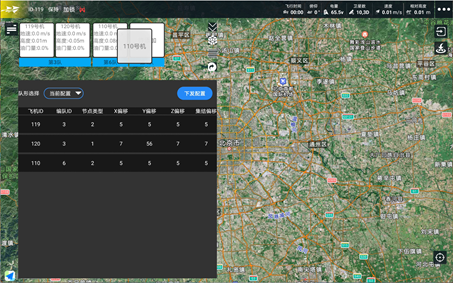
点击 按钮,展开编队配置界面
按钮,展开编队配置界面
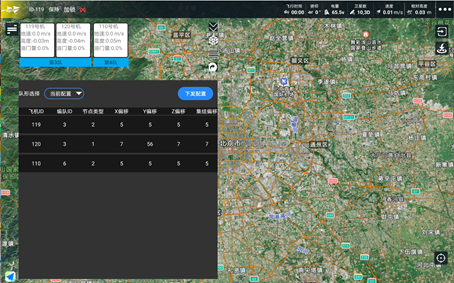
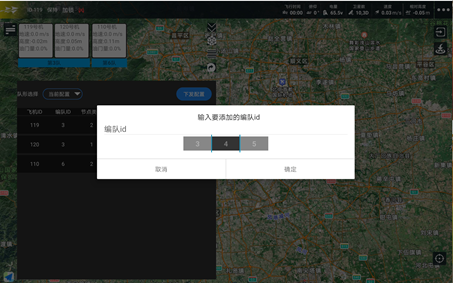
点击 ,可添加编队;左右滑动数字条,确定编队ID,点击确定,即可添加编队。
,可添加编队;左右滑动数字条,确定编队ID,点击确定,即可添加编队。
长按 可拖动飞机编号更改飞机编队
可拖动飞机编号更改飞机编队
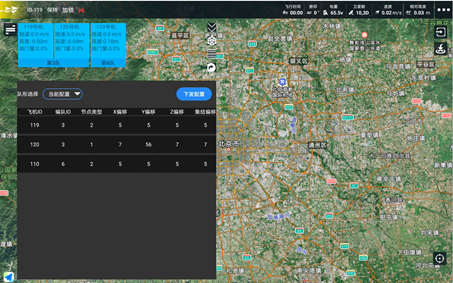
点击 ,编队全选。
,编队全选。
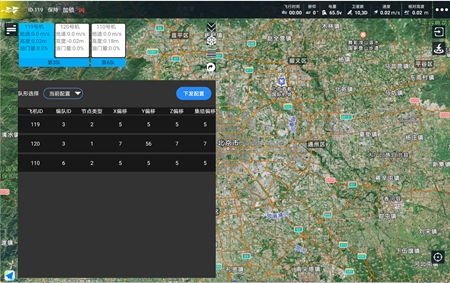
点击取消编队全选,仅保留当前控制中的飞机。

| 序号 | 注解 | 序号 | 注解 |
|---|---|---|---|
| ① | 解锁起飞 | ④ | 降落 |
| ② | 飞机加锁 | ⑤ | 进入航线 |
| ③ | 起飞 | ⑥ | 返航 |